
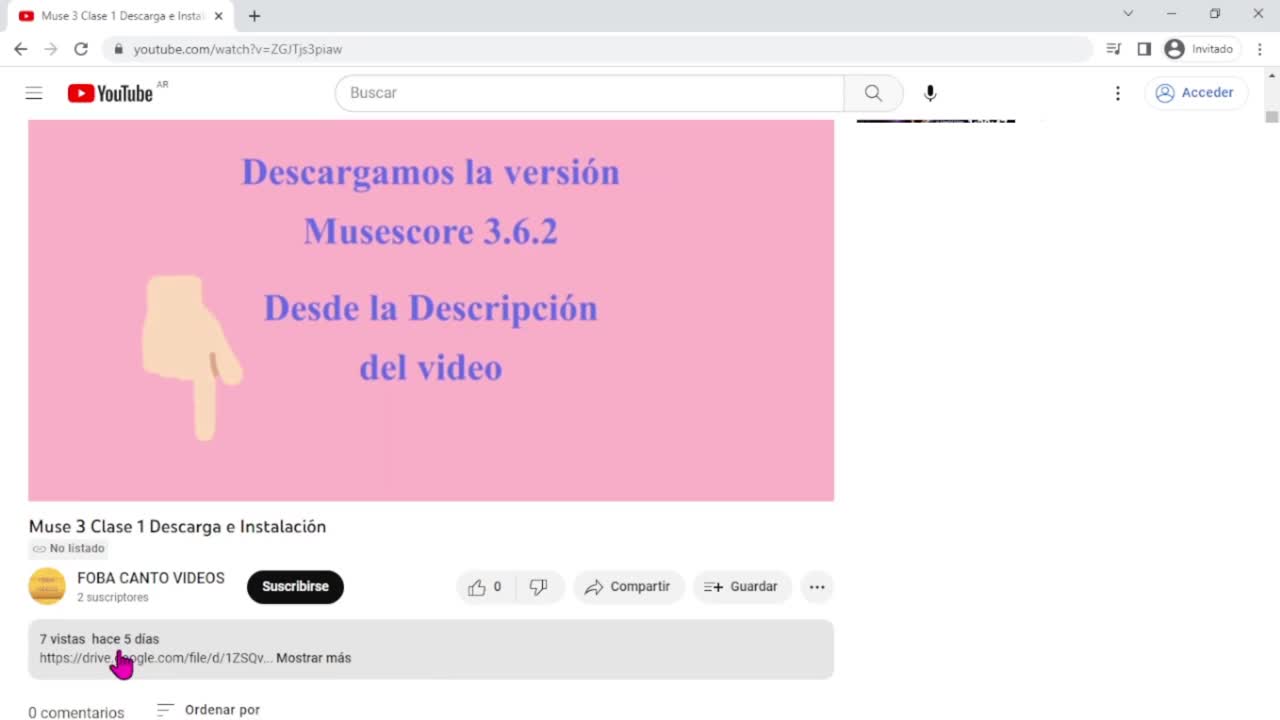
Muse3 Micro 01 Descarga e Instalación
Campus_Virtual24
Music
Bachelors
0 views
Tutorial e Hipervínculos de la última versión 3












Brain Break - Super Genius - Mr. O
Cipherkam
Music
4th Grade
0 views
Empowerment through Trap Music: Mr. O the Hip Hop Teacher's Inspirational Me...
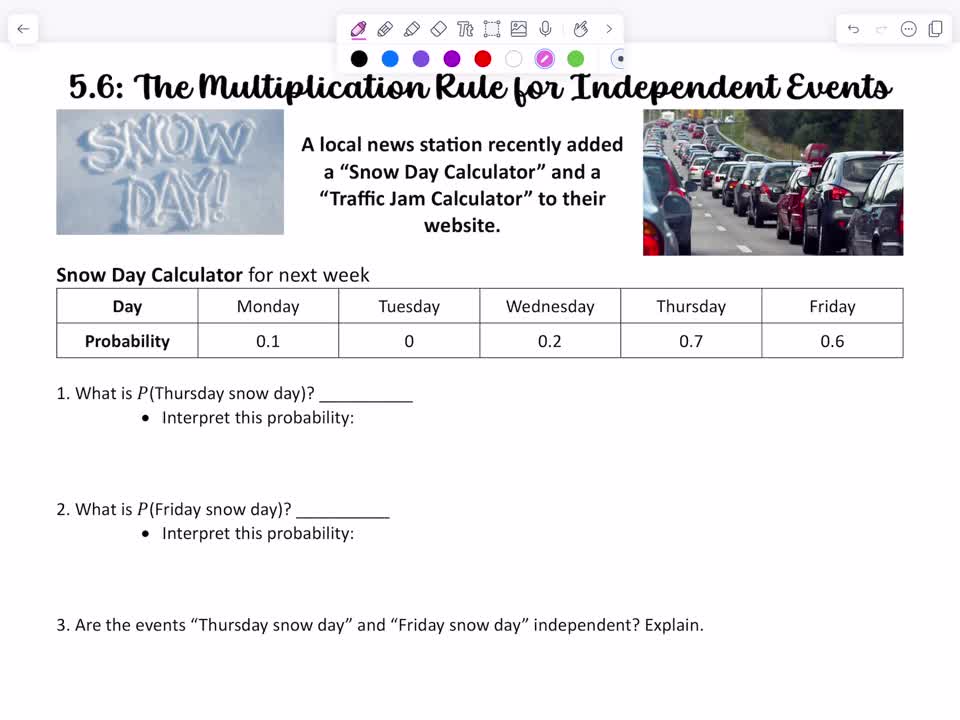
5.6 Video Explanation
aubreymoore
Probability and Statistics
11th Grade
0 views
Video explanation of multiplication rule for independent events